KnitDermis on-body interfaces deliver expressive tactile feedback on the wearer’s body. Fabricated through machine knitting, they embed shape-memory alloy micro-springs in knitted channels, which deliver tactile sensations on the skin when activated.
Jin Hee (Heather) Kim, Kunpeng Huang, Simone White, Melissa Conroy, Cindy Hsin-Liu Kao
ACM Designing Interactive Systems (DIS) 2021, Best Paper Honorable Mention Award
PDF | DIO | Talk | Demo | Hybrid Body Lab

We present KnitDermis, on-body interfaces that deliver expressive non-vibrating mechanotactile feedback on the wearer’s body. Fabricated through machine knitting, they embed shape-memory alloy micro-springs in knitted channels, which deliver tactile sensations on the skin when activated. KnitDermis interfaces take advantage of machine knitting’s shaping properties which allow it to generate slim, stretchable, and versatile forms that can conform to underexplored body locations, such as protruded joints and convex body locations. We introduce a fabrication approach and a series of case studies to design a wide range of form factors, textures, and tactile patterns, including compression, pinching, brushing, and twisting. We conduct a user study to elicit KnitDermis’ effectiveness and wearability on diverse body locations and engage users to unpack envisioned use cases and perceptions towards the interfaces. We draw insights from our extensive research-through-design investigations on the potential of knitting as a soft approach for close-body and expressive tactile interfaces.
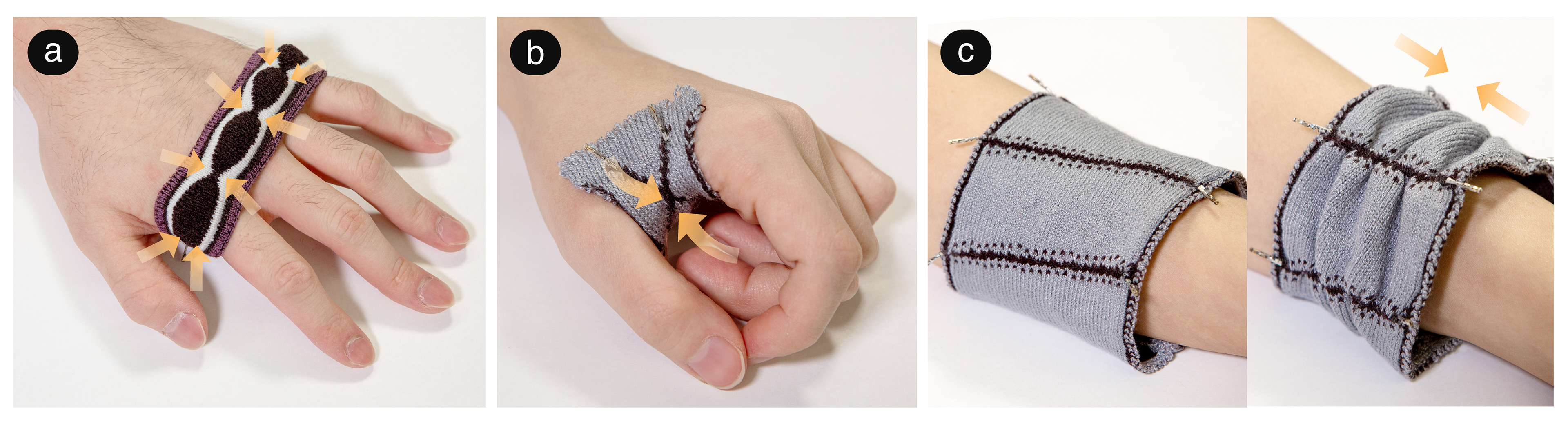
KnitDermis on-body interfaces deliver expressive tactile feedback on the wearer’s body. Fabricated through machine knitting, they embed shape-memory alloy micro-springs in knitted channels, which deliver tactile sensations on the skin when activated. KnitDermis interfaces take advantage of the shaping properties of machine knitting for slim, stretchable, and versatile forms that conform to underexplored body locations, such as (a) protruded joints and (b) convex (hollow) body locations, delivering sensations from (a) compression, (b) pinching, (c) brushing, to twisting. We introduce knitting as a soft approach for crafting expressive and personal tactile interfaces. (Image Credit: Hybrid Body Lab) (License: CC BY-NC-SA 4.0)

KnitDermis brushing interface during actuation.

KnitDermis compression interface during actuation while worn on the knuckles.

KnitDermis pinch interface during actuation while worn on the hand.

KnitDermis twisting interface during actuation.

KnitDermis pinch interface during actuation while worn on the ankle.

KnitDermis compression interface during actuation while worn on the forearm.
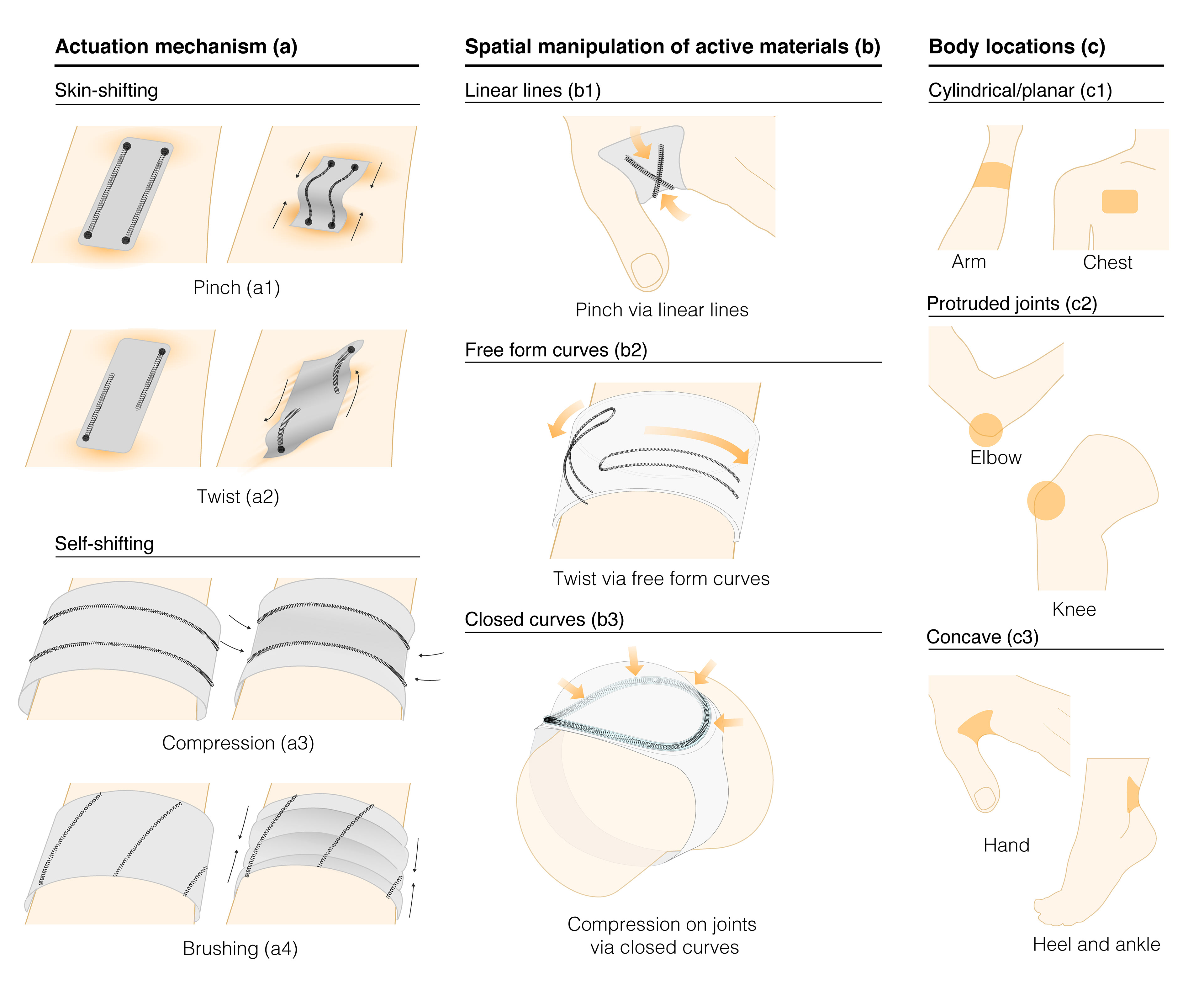
The main design factors for KnitDermis interfaces consist of actuation mechanism (a), spatial manipulation of SMA (b), and body location (c). Actuation is achieved either through shifting the skin in various directions (a1-2) or morphing the interface itself radially (a3) and longitudinally (a4). More specific designs of haptic feedback are enabled by shaping SMA (b). A set of crossing linear lines can yield different forces depending on the skin area in contact (b1). Open free form curves can be used to enlarge the skin area being affected (b2). Closed curves can work in concert with underlying skin geometry (b3). By altering parameters (length, curvature, or distance) of SMA placement, the haptic sensation can be fine-tuned. KnitDermis can be applied on a variety of unexplored body locations such as cylindrical or planar spots (c1), protruded spots (c2), and concave spots (c3). (Image Credit: Hybrid Body Lab) (License: CC BY-NC-SA 4.0)
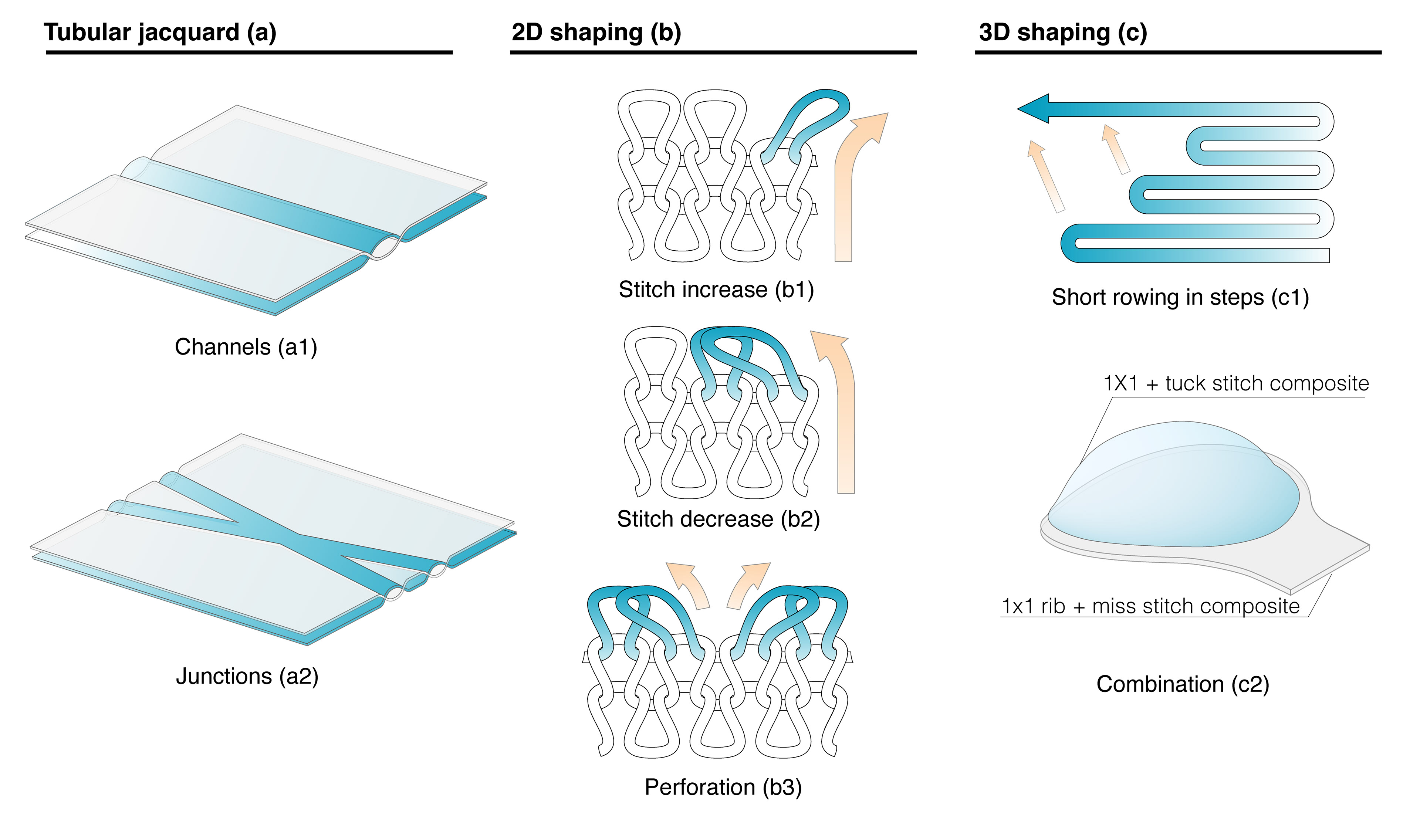
A catalog of knit structures adopted by KnitDermis. Tubular jacquard (a) is used to encase active and passive materials. With complete freedom in size and shape, tubular jacquard can create channels to accommodate yarn-like materials (a1), let materials cross each other (a2), or create a pocket to accommodate larger components. By manipulating stitches (b) KnitDermis’ interfaces can contour body topography (b1-2). Modifying the stitches can also perforate the substrate to connect the materials to a power source or other components (b3). Volumetric shaping can be achieved by skipping a section of needles for "short rows" (c1) or combining heterogeneous structures (c2). (Image Credit: Hybrid Body Lab) (License: CC BY-NC-SA 4.0)

Summary of eight KnitDermis case studies. Depending on haptic feedback of interest, each case study variously configures design factors to conform to specific body locations. B-wrist and C-wrist adopt self-shifting mechanism whereas the remainder utilizes skin-shifting mechanism. (Image Credit: Hybrid Body Lab) (License: CC BY-NC-SA 4.0)
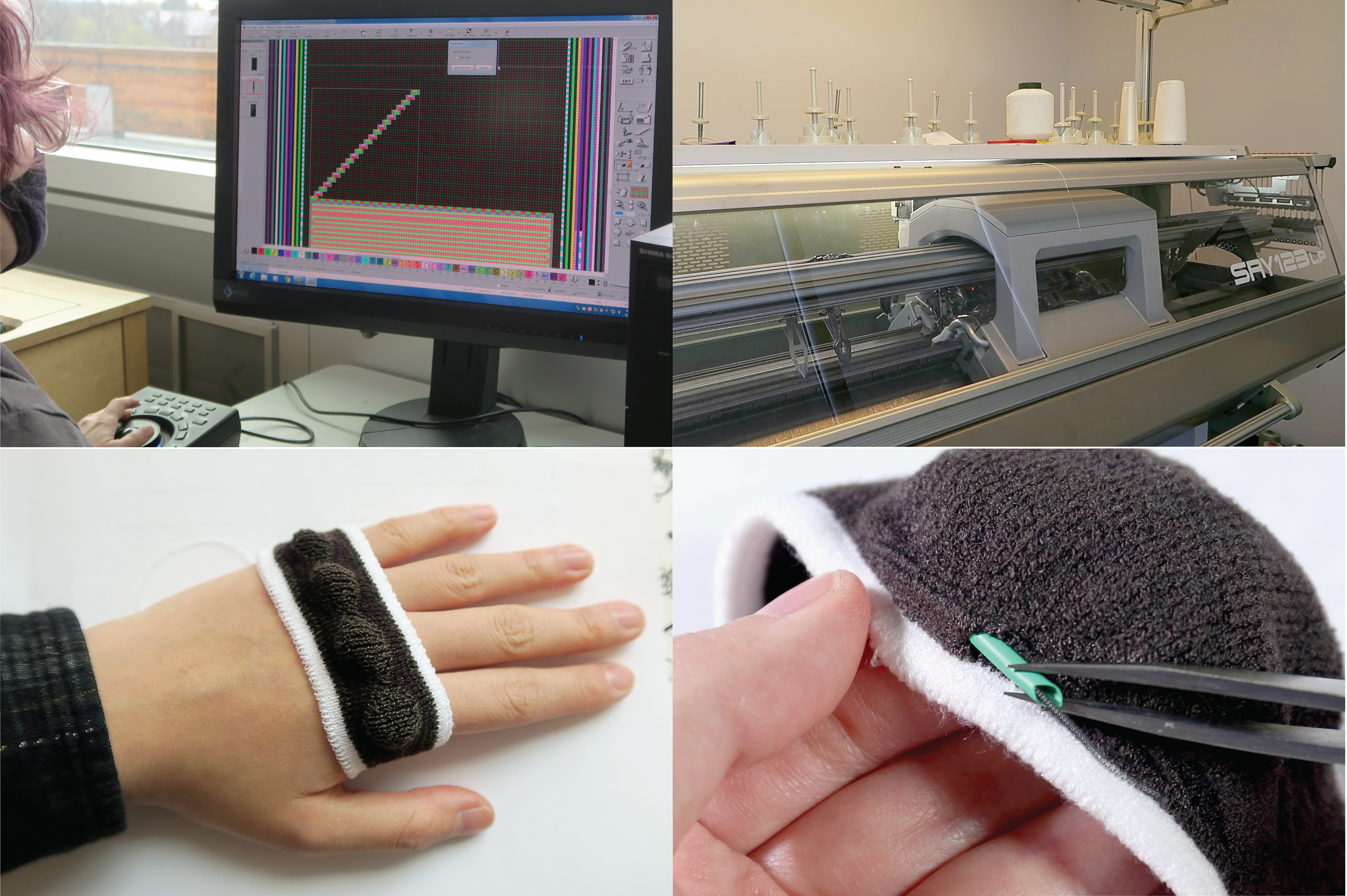
KnitDermis’ four-step fabrication process. Step 1: Program designs of KnitDermis substrates on Apex 3. Step 2: Knit substrates with desired yarns and appropriate stitch cam setting. Step 3: Place substrates on the body to see if they conform to underlying body geometry and that SMA is placed fittingly. Step 4: Prior to threading active materials including SMA, insert soft and flexible tubes to protect substrates. (Image Credit: Hybrid Body Lab) (License: CC BY-NC-SA 4.0)
Jin Hee (Heather) Kim, Kunpeng Huang, Simone White, Melissa Conroy, and Cindy Hsin-Liu Kao. 2021. KnitDermis: Fabricating Tactile On-Body Interfaces Through Machine Knitting. In Designing Interactive Systems Conference 2021 (DIS '21). Association for Computing Machinery, New York, NY, USA, 1183–1200. DOI:https://doi.org/10.1145/3461778.3462007